
Un robot buceador humanoide explora naufragios en el fondo del océano
(CNN) -- Un robot creado en la Universidad de Stanford en California se sumerge en naufragios y aviones hundidos de una manera que los humanos no pueden. Conocido como OceanOneK, el robot permite que sus operadores se sientan como exploradores submarinos también.
OceanOneK se asemeja a un buzo humano desde el frente, con brazos, manos y ojos que tienen visión 3D, capturando el mundo submarino a todo color.
La parte posterior del robot tiene computadoras y ocho propulsores multidireccionales que lo ayudan a maniobrar con cuidado en los frágiles barcos hundidos.

OceanOneK, aquí haciendo un experimento en una piscina en la Universidad de Stanford, se parece a un buzo humano.
Cuando un operador en la superficie del océano usa controles para dirigir OceanOneK, el sistema de retroalimentación háptica (basada en el tacto) del robot hace que la persona sienta la resistencia del agua, así como los contornos de los artefactos.
Las capacidades táctiles y visuales realistas de OceanOneK son suficientes para que las personas sientan que se sumergen en las profundidades, sin los peligros o la inmensa presión submarina que experimentaría un buceador humano.
El especialista en robótica de la Universidad de Stanford, Oussama Khatib, y sus estudiantes se asociaron con arqueólogos de aguas profundas y en septiembre comenzaron a enviar al robot a inmersiones. El equipo acaba de terminar otra expedición submarina en julio.
Hasta ahora, OceanOneK ha explorado un avión Beechcraft Baron F-GDPV hundido, el barco de vapor italiano Le Francesco Crispi, un barco romano del siglo II frente a Córcega, un avión Lightning P-38 de la Segunda Guerra Mundial y un submarino llamado Le Protée.
El Crispi se encuentra a unos 500 metros (1.640 pies) por debajo de la superficie del mar Mediterráneo.
"Te estás moviendo muy cerca de esta asombrosa estructura, y algo increíble sucede cuando la tocas: realmente la sientes", dijo Khatib, profesor de Weichai en la Escuela de Ingeniería de Stanford y director del Laboratorio de Robótica de Stanford.
"Nunca había experimentado algo así en mi vida. Puedo decir que fui yo quien tocó el Crispi a 500 (metros). Y lo hice, lo toqué, lo sentí".
OceanOneK podría ser solo el comienzo de un futuro en el que los robots asuman la exploración submarina que es demasiado peligrosa para los humanos, ayudándonos a ver los océanos de una forma completamente nueva.
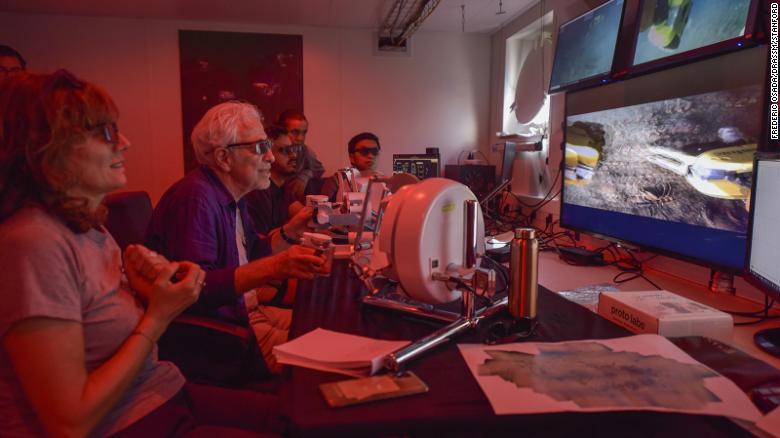
El especialista en robótica de la Universidad de Stanford Oussama Khatib (segundo desde la izquierda) pudo sentir sensaciones en sus manos utilizando el sistema de retroalimentación del robot.
Creando un robot submarino
El desafío de crear a OceanOneK y a su predecesor, OceanOne, fue construir un robot que pudiera soportar un entorno submarino y la inmensa presión a varias profundidades, dijo Khatib.
OceanOne hizo su debut en 2016, explorando el buque insignia naufragado del rey Luis XIV, La Lune, que se encuentra a 100 metros (328 pies) por debajo del Mediterráneo a 32 kilómetros (20 millas) del sur de Francia. El naufragio de 1664 permaneció intacto por los humanos.
El robot recuperó un jarrón del tamaño de una toronja y Khatib sintió las sensaciones en sus manos cuando OceanOne tocó el jarrón antes de colocarlo en una canasta de recuperación.
La idea de OceanOne surgió del deseo de estudiar los arrecifes de coral dentro del Mar Rojo a profundidades más allá del rango normal para los buceadores. El equipo de Stanford quería crear algo que se acercara lo más posible a un buzo humano, integrando inteligencia artificial, robótica avanzada y retroalimentación háptica.
El robot mide aproximadamente 1,5 metros (5 pies) de largo y su cerebro puede registrar el cuidado con el que debe manejar un objeto sin romperlo, como corales o artefactos erosionados por el mar. Un operador puede controlar el bot, pero está equipado con sensores y cargado con algoritmos para que pueda funcionar de forma autónoma y evitar colisiones.
Si bien OceanOne fue diseñado para alcanzar profundidades máximas de 200 metros (656 pies), los investigadores tenían un nuevo objetivo: 1 kilómetro (0,62 millas), de ahí el nuevo nombre de OceanOneK.
El equipo cambió el cuerpo del robot utilizando una espuma especial que incluye microesferas de vidrio para aumentar la flotabilidad y combatir las presiones de 1.000 metros, más de 100 veces lo que experimentan los humanos al nivel del mar.

OceanOneK pasa por una prueba de agarre de un objeto en una piscina de Stanford.
Los investigadores mejoraron los brazos del robot con un mecanismo de resorte y aceite que evita la compresión a medida que desciende a las profundidades del océano. OceanOneK también obtuvo dos nuevos tipos de manos y mayor movimiento de brazos y cabeza.
El proyecto viene con desafíos que nunca ha visto en ningún otro sistema, dijo Wesley Guo, estudiante de doctorado en la Escuela de Ingeniería de Stanford. "Se requiere mucho pensamiento innovador para que esas soluciones funcionen".
El equipo usó la piscina recreativa de Stanford para probar el robot y realizar experimentos, como llevar una cámara de video en una pluma y recolectar objetos. Luego vino la prueba definitiva para OceanOneK.
Inmersiones profundas
En una gira por el Mediterráneo que comenzó en 2021, OceanOneK se sumergió a estas profundidades sucesivas: 124 metros (406 pies) hasta el submarino, 334 metros (1.095 pies) hasta los restos del barco romano y, en última instancia, 852 metros (0,5 millas) para demostrar que tiene la capacidad de sumergirse a casi 1 kilómetro. Pero no fue un camino sin problemas.

OceanOneK alcanza la carga de un antiguo barco romano.
Guo y otro estudiante de doctorado de Stanford, Adrian Piedra, tuvieron que arreglar uno de los brazos discapacitados del robot en la cubierta de su barco por la noche durante una tormenta.
"Para mí, el robot lleva ocho años en desarrollo", dijo Piedra. "Tienes que entender cómo funciona cada parte de este robot: cuáles son todas las cosas que pueden salir mal, y las cosas siempre salen mal. Así que siempre es como un rompecabezas. Ser capaz de sumergirse profundamente en el océano y explorar algunos restos de naufragios que nunca se habrían visto tan de cerca es muy gratificante".

Los estudiantes trabajan para solucionar un problema con OceanOneK durante una expedición.
Durante la inmersión profunda de OceanOneK en febrero, los miembros del equipo descubrieron que el robot no podía ascender cuando se detuvieron para revisar el propulsor. Las flotaciones en la línea de comunicaciones y energía se habían derrumbado, lo que provocó que la línea se apilara sobre el robot.
Pudieron arreglarlo y el descenso del OceanOneK fue un éxito. Dejó un marcador conmemorativo en el lecho marino que dice: "El primer toque de un robot en el lecho marino profundo / Un vasto mundo nuevo para que los humanos exploren".
Khatib, profesor de informática, calificó la experiencia como un "viaje increíble". "Esta es la primera vez que un robot ha sido capaz de ir a tanta profundidad, interactuar con el entorno y permitir que el operador humano sienta ese entorno", dijo.
En julio, el equipo volvió a visitar el barco romano y el Crispi. Si bien el primero casi ha desaparecido, su carga permanece esparcida por el lecho marino, dijo Khatib. En el sitio del barco romano, OceanOneK recolectó con éxito jarrones antiguos y lámparas de aceite, que aún llevan el nombre de su fabricante.
El robot colocó cuidadosamente una cámara boom dentro del casco fracturado de Crispi para capturar videos de corales y formaciones de óxido mientras las bacterias se dan un festín con el hierro del barco.

El robot extiende una cámara boom dentro del casco del barco de vapor italiano Le Francesco Crispi.
"Vamos hasta Francia para la expedición, y allí, rodeados por un equipo mucho más grande, proveniente de una amplia gama de orígenes, te das cuenta de que la pieza de este robot en el que has estado trabajando en Stanford es en realidad parte de algo mucho más grande", dijo Piedra.
"Tienes una idea de cuán importante es esto, cuán novedosa y significativa será la inmersión y qué significa esto para la ciencia en general".
Un futuro prometedor
El proyecto nacido de una idea en 2014 tiene un largo futuro de expediciones planificadas a ciudades submarinas perdidas, arrecifes de coral y naufragios profundos. Las innovaciones de OceanOneK también sientan las bases para proyectos de ingeniería submarina más seguros, como la reparación de embarcaciones, muelles y tuberías.
Una próxima misión explorará un barco de vapor hundido en el lago Titicaca, en la frontera de Perú y Bolivia.
Pero Khatib y su equipo tienen sueños aún más grandes para el proyecto: el espacio.
Khatib dijo que la Agencia Espacial Europea ha expresado interés en el robot. Un dispositivo háptico a bordo de la Estación Espacial Internacional permitiría a los astronautas interactuar con el robot.
"Pueden interactuar con el robot en las profundidades del agua", dijo Khatib, "y esto sería increíble porque simularía la tarea de hacer esto en un planeta diferente o en una luna diferente".